オルソフォト/DSM
サードパーティーのGIS/CADソフトウェアまたは画像処理ツールでの視覚化と解析に対応した互換性のあるラスターレイヤを作成します。
注記: タイリング使用時に、オルソフォト/DSMモデル制作で1タイルあたり1ファイルが生成されます。「オルソフォトパーツを結合」コマンド(ContextCaptureのモデル制作が終了すると使用可能)を使用すると、オルソフォトおよびDSMの1つの結合ファイルを作成できます。
 DSMを出力するには、先に参照3Dモデルの幾何形状を生成する必要があります。
DSMを出力するには、先に参照3Dモデルの幾何形状を生成する必要があります。
オプション
- サンプリングの距離 - サンプリングの距離を設定します。単位は選択した空間参照系によります。
- 最大画像の大きさ(px)- 最大の画像のディメンションを設定します。生成されるラスターファイルの最大のタイルサイズです。
- 投影モード - 3Dモデル(最高標高点または最低標高点)からどのように2Dデータのレイヤを生成するかを設定します。
- オルソフォト/DSM - オルソフォト/DSMの生成/非生成を選択します。
- カラーソース -
最適計算(可視色) - 実際の投影に応じた、可視色を使用したベストな写真が選択されます。
最適計算(熱) - 実際の投影に応じた、熱を使用したベストな写真が選択されます。
参照3Dモデル(可視色) - 可視色を使用した内部の参照3Dモデルテクスチャをそのまま使います(その方が処理が速いため)。
参照3Dモデル(熱) - 熱を使用した内部の参照3Dモデルテクスチャをそのまま使います(その方が処理が速いため)。
- データなし - 情報のないピクセル値またはピクセルカラー。
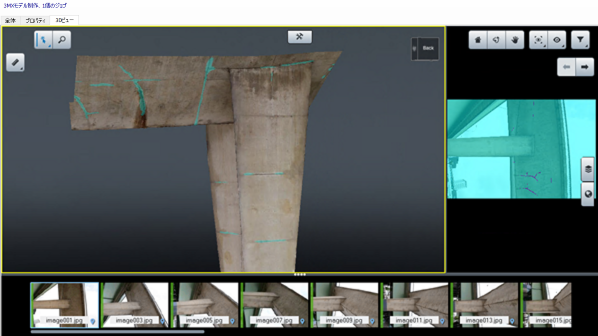
注釈検出ツール
最初に注釈タイプを設定します。以下に説明する特定のケースでない限り、ユーザーが独自のソースをインポートするとき、注釈は検出ツールを含む処理から生成されます。検出ツールは特定のデータに向けられており、同じ種類(同じ性質、同じ環境、同じデータ品質および解像度)のデータに対して最適化または限定されています。注釈の処理に使用できる検出ツールのタイプを以下に示します。
検出ツールのタイプは特定の注釈タイプ向けに設計されています。たとえば、オルソフォト検出ツールは3Dセグメンテーションジョブで適用できます。一連の検出ツールは、専用のBentleyコミュニティのWebページにあります。
このページは、「ContextCaptureマスター注釈」ページ(フォーマット/オプション)からアクセスできます。
目的に合う検出ツールがない場合、個人ポータルからヘルプ要求を送信して必要なものを説明するように促されます。
注釈タイプ
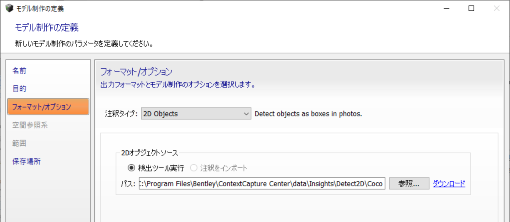
2Dオブジェクト
これは、ブロックを構成する画像からオブジェクトを検出します。画像内の関心のあるオブジェクトの周囲に矩形ボックスが自動的に描画されます。これらの矩形ボックスは写真ビューで表示可能であり、構造化したXMLファイルとしてモデル制作ディレクトリに記録されます。

対象となるオブジェクトは、検出ツールに認識されるように訓練されたオブジェクトです。この検出ツールへのパスは次のように定義する必要があります。

画像オブジェクト検出ツールのみがこのタイプのジョブの実行に使用できます。
2Dセグメンテーション
データセットの各画像は使用する検出ツールに従って分類されます。対象となるクラスが自動的に抽出されます。これは各入力画像に対してPNGマスクを作成します。このマスクの各ピクセルによって、属すると思われるクラス(一意のピクセル値)が取得されます。一連のマスクは、単一のXMLファイルによって、モデル制作ディレクトリに記録され、ブロックの画像にリンクされています。2Dセグメンテーションの結果は「写真」タブで確認できます。対象となるクラスは検出ツールの訓練時に定義されたクラスです。
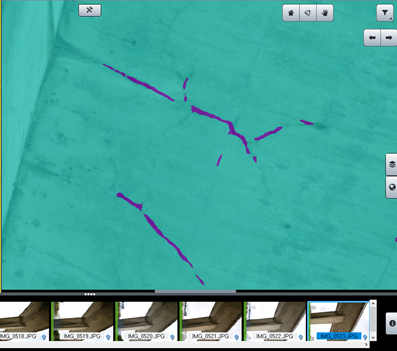
画像セグメンテーション検出ツールのみがこの目的に使用できます。
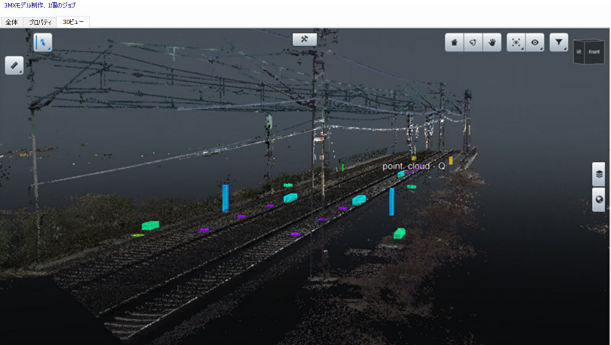
3Dオブジェクト
これは、対象となる要素の周囲に標準3Dオブジェクト(ボックス)を描画します。対象の要素は、検出ツールまたはインポートするように選択した2D注釈によって定義された要素です。3DオブジェクトはXMLフォーマットで記録され、DGNにエクスポートできます。タイポイントおよび点群(ある場合)は、個々の隣接するインスタンスを適切に識別するために使用できます。注釈が3Dオブジェクトとなるように、最小数のビューで一意の2D検出の必要量が定義されます。

3Dオブジェクトは処理の後に3Dビューで表示可能であり、既存のメッシュ生成をオーバーレイします。

画像オブジェクト検出ツールのみがこの目的に使用できます。
3Dセグメンテーション
これは、3D点群の分類を実行します。通常はContextCapture Engineによって処理されたもの(リコンストラクション参照メッシュ)、またはブロックにインポートされたもの(ブロック点群)です。この注釈ジョブの未加工の結果は分類された点群です。このクラスは、適切な検出ツールを実行するか、または注釈をXMLフォーマットでインポートすると得られます。結果として得られる分類された点群はLASフォーマットでエクスポートできますが、ContextCapture Masterの3Dビューで表示することはできません。ContextCapture Editorで、結果として得られる分類されたLASファイルを取り扱うことができます。

3Dセグメンテーションから、個々の3Dオブジェクトをエクスポートすることもできます。これらの3Dオブジェクトは3D点群クラスをベースに作成されます。同じクラスの隣接する点が1つの個別のオブジェクトを抽出します。3Dの個々のオブジェクトはXMLとして記録され(3Dオブジェクトを参照)、DGNまたはOBJファイルとしてエクスポートできます。3Dセグメンテーションから引き出した3DオブジェクトはContextCapture Master 3Dビューで表示できます。
クラス分類された点群のうち、3Dオブジェクトが構成された部分は、個々のLASファイルとしてエクスポートすることもできます。個々の3Dオブジェクトの識別は、追加の2Dオブジェクト検出の計算をするか、2Dオブジェクトの注釈をインポートすることで改善できます。このような場合、結果として得られる注釈は、クラス分類された点群であり、画像からの2Dオブジェクト検出を用いて最適化された個々の3Dオブジェクトが加わっている可能性があります。このタイプの作業には、画像セグメンテーション検出と点群セグメンテーション検出ソースのみが使用できます。画像オブジェクト検出も使用可能ですが、隣接オブジェクトの分離を最適化するための補助的な役割に限定されます。
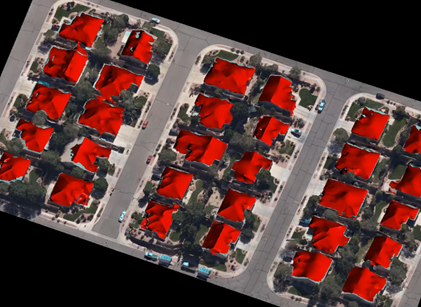
オルソフォトのセグメント化
このジョブの結果は、連続したPNGマスクと連続したオルソフォト(およびDSM(選択されている場合))の組み合わせです。オルソフォトの生成設定については専用セクションで説明されています。PNGマスクは、ユーザー定義の検出によるクラス分類の結果です。PNGマスクは地理的に登録され、RGBオルソフォトをオーバーレイします。PNGマスクの各ピクセルは、検出によりクラス定義された1つの値に対応します。

検出ソースはジョブを処理する段階で定義する必要があります。PNG形式のマスクをクラス分類した後、Shapeファイル形式の線分にエクスポートできます。これにより、クラスオーバーレイが連続したポリゴンに変換され、GISソフトウェアでのデータ管理に最適化されます。

このタイプのジョブには、オルソフォトとオルソフォト+DSMの検出ソースだけが使用できます。DSMの役割は、対象となる要素の高さに応じてクラス分類を最適化することです。たとえば、ビルディング形状があります。1枚のオルソフォトではなく、オルソフォト+DSMのケースで検出ソースを学習させてから処理すると、抽出がより正確になります。
セグメント化されたオルソフォトは、ContextCapture Masterの3Dビューに表示できません。
セグメントメッシュ
セグメント化されたメッシュの結果は、従来のContextCaptureメッシュで検出された要素に対し明るい色としてテクスチャに追加されます。従来のメッシュ生成と同様に、データ形式、LOD、テクスチャサイズなどの設定がユーザーによって定義でき、さらに注釈の設定も定義できます。

検出が実行されるか、または既存の注釈がXMLファイルとしてインポートされ、テクスチャにクラス分類情報を取り込んだメッシュが生成されます。判定するビューの最小数には、RGBのテクスチャをクラス分類されたテクスチャに変えるために必要となる検出数を定義します。
セグメントメッシュは、ContextCapture Masterの3Dビュー(メッシュ形式により異なる)で見ることができ、2Dセグメンテーション結果があればそれも見ることができます。
このタイプのジョブには、画像セグメンテーションと点群セグメンテーションの検出ソースだけが使用できます。
メッシュパッチ
メッシュパッチは、セグメントメッシュと同じジョブを実行しますが、メッシュのテクスチャのすべての領域をクラス分類し線分化することができます。セグメント化されたテクスチャパッチは、それぞれOBJファイルとしてエクスポートされます。これらのOBJファイルに含まれるすべてのマテリアルは、点群としてエクスポートできます。
このタイプのジョブに使用できるのは、画像セグメンテーション検出ソースと点群セグメンテーション検出ソースのみです。メッシュパッチはContextCapture Master 3Dビューでは表示できません。